


Bu rehberde, ORBITF435 uçuş kontrol kartı ve ORBIT BLS 50A 4in1 ESC ile FPV drone’unuzu nasıl kuracağınızı adım adım anlatıyoruz. Daha önce hiç drone toplamamış olsanız bile, bu dokümanı takip ederek kendi dronunuzu uçuşa hazır hale getirebilirsiniz.
A. Parça Listesi
Burada donanım kurulumu ile ilgili kısaca bilgiler verilecektir. Sonrasında kullanmak istediğiniz uçuş kontrol yazılımı ile ilgili başlığa geçerek yazılım konfigürasyon kısmını tamamlayabilirsin.
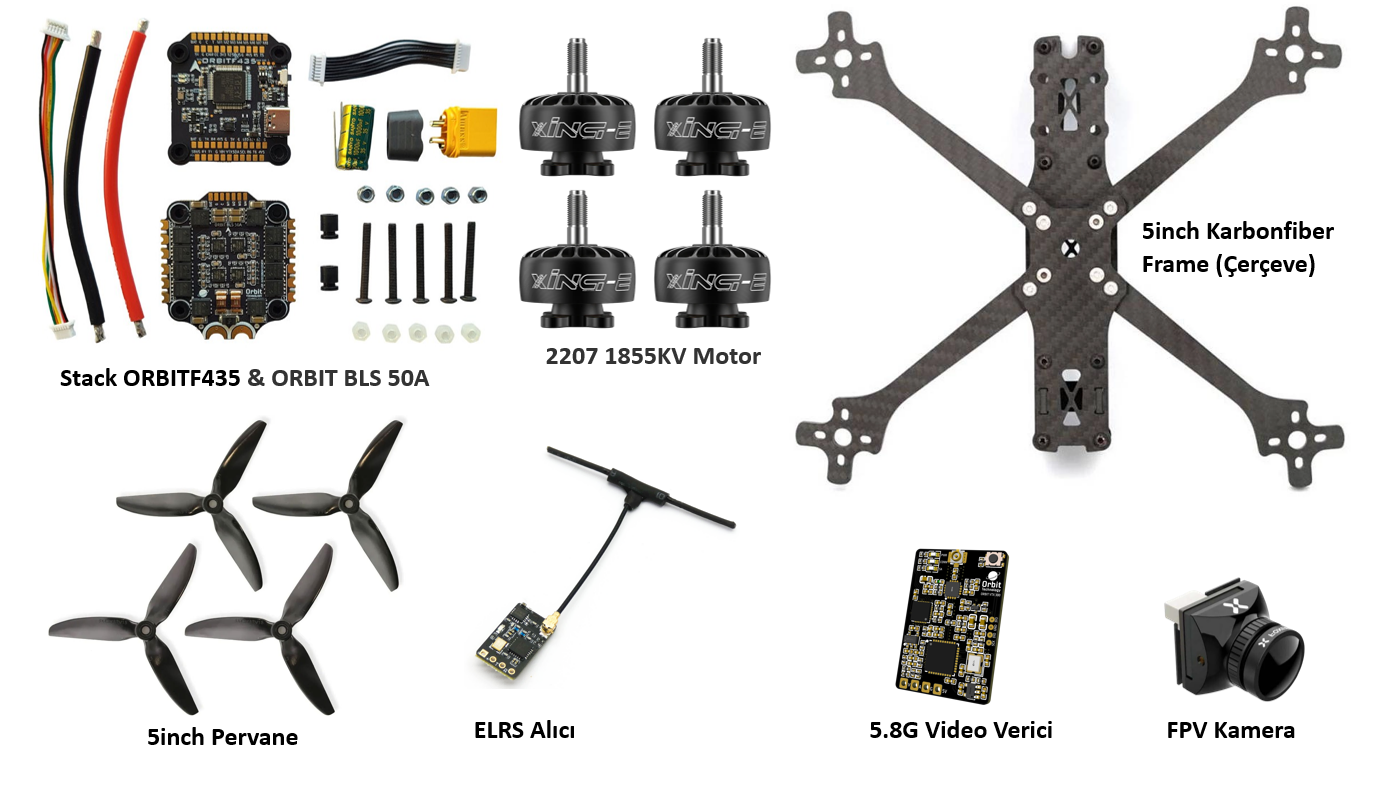
Öncelikle bir FPV drone toparlayabilmek için aşağıdaki parçalara ihtiyacınız olacaktır. Bu parçalar ile hızlı bir şekilde FPV dronunuzu oluşturabilirsiniz:
Frame (Çerçeve) | Source One V5 Frame |
Uçuş Kartı | ORBITF435 |
ESC | ORBIT BLS 50A 4in1 |
Motorlar | 4x iFlight Xing2 2207 1855KV |
Pervaneler | 4x HQ 5×4.3×3 V2S |
Alıcı | ORBIT 2.4Ghz Nano RX |
FPV Kamera | Caddx Ratel 2 |
VTX | ORBIT VTX300 |
Temel Araçlar ve Malzemeler
Yukarıda bahsettiğimiz bileşenlerin yanı sıra, alet ve malzemelere de ihtiyacınız olacak. Bunlardan bazılarına zaten sahip olabilirsiniz, ancak yoksa elektronik malzeme satan dükkanlardan, nalburlardan veya internetten kolayca bulabilirsiniz:
- Havya, lehim ve flux
- Altıgen tornavida seti (olması gereken boyutlar 1,5 mm, 2,0 mm ve 2,5 mm’dir)
- Hassas (küçük uçlu) tornavida seti
- Vida sabitleme sıvısı (önerilir – motor vidalarını sabitlemek için)
- Kabloları soymak ve kesmek için kablo sıyırıcı veya keski
- 3M çift taraflı köpük bant (isteğe bağlı – bileşenleri çerçeveye sabitlemek için)
- Dijital multimetre veya/veya VIFLY ShortSaver V2 (ilk kez pili takmadan önce güvenlik kontrolleri için)
- 2 mm plastik kelepçe 15 cm veya daha uzun (kabloları ve bileşenleri çerçeveye sabitlemek için)
- Kumaş bant veya elektrik bandı (15 mm genişlik idealdir, motor kablolarını sarmak için mükemmeldir, ancak elektrik bandıda kullanabilirsiniz)
- 28AWG silikon elektrik teli (FC’ye bileşenleri lehimlemek için)
- Pil pedi (isteğe bağlı)
- Pervane somunu çevirmek için anahtar (isteğe bağlı)
Frame (Çerçeve)

Bir frame (çerçeve), tüm bileşenleri bir arada tutan sağlam bir yapıdır.
Bu eğitim için uygun fiyatı ve açık kaynaklı yapısı nedeniyle mükemmel bir tercih olan TBS Source One V5 kasasını tercih edebiliriz. Tasarım, ilgili topluluğun sürekli güncellemeleri sayesinde zamanla gelişti; böylece güncel donanımlarla uyumluluk sağlandı, performans ve kullanılabilirlik optimize edildi.
Source One’ın bir diğer büyük avantajı ise Thingiverse üzerinde bulunan çok sayıda ücretsiz 3D baskı tasarımıdır. Bu tasarımlar sayesinde FPV drone yapınızı daha da geliştirebilir ve özelleştirebilirsiniz.
Uçuş Kontrol Kartı ve ESC
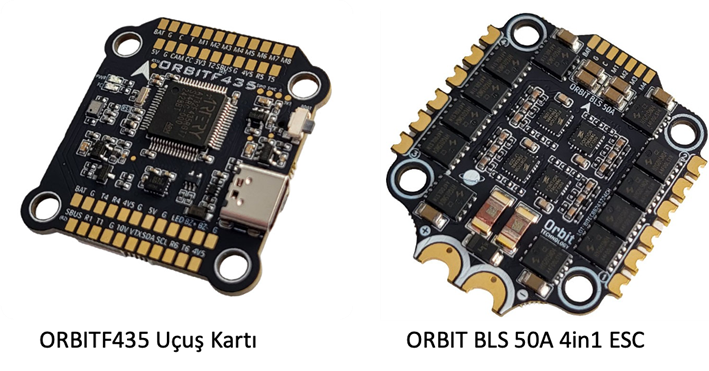
Uçuş kontrolörü ve ESC satın alırken hem uçuş kontrolörü kartını hem de 4’ü 1 arada ESC kartını içeren bir “Stack” halinde almaya çalışın. Birlikte satın almak, kutudan çıkar çıkmaz tak ve çalıştır özelliğiyle kablolama ve lehimlemeyi kolaylaştırır. Ayrıca, bunları ayrı ayrı satın almaktansa birlikte satın almak genellikle daha ucuzdur.
Bu eğitim için ORBITF435 ürününü tercih edebilirsiniz. Yerli tasarım olan bu uçuş kontrol kartı, Betaflight ve iNav yazılımlarıyla uyumludur. Gücünü hızlı AT32F435 işlemcisinden alır ve ICM42688 IMU sensörü ile daha hassas, daha stabil bir uçuş performansı sunar. Ayrıca Betaflight bağlantı standartlarına tam uyumludur ve DJI Air Unit gibi HD video vericiler için tak-çalıştır soket içerir.
Motorlar
Bu eğitim için 2207 boytlu bir motor tercih edebilirsiniz. Benzer boyutlardaki popüler motorlar genellikle benzer performansa sahip olsa da, temel fark genellikle üretim kalitelerinde yatar. 5 inçlik bir FPV drone için 2306, 2207 ve 2208 gibi motor boyutlarının hepsi uygun seçeneklerdir.

Dikkate alınması gereken bir diğer önemli faktör, akü voltajına göre belirlenen motor KV’sidir. Motor KV seçerken, 1600–2100KV değerleri 6S piller, 2300–2800KV değerleri ise 4S piller için uygundur. Daha yüksek KV seçenekleri genellikle daha agresif ve güç tüketimi yüksek olurken, daha düşük KV seçenekleri daha verimli ve dengeli çalışır. Bu yapıda, 6S LiPo akü kullanmayı planladığımız için 1855 KV motorlar kullanıyoruz.
FPV (VTX)
Bu rehberde analog FPV sisteminin kurulumunu ve ayarlarını ele alacağız. Analog yapı için, Source One kasasına kolayca monte edilebilen uygun fiyatlı ve yüksek performanslı bir VTX olan ORBIT VTX300’ü kullanacağız.
Radyo Alıcısı (ELRS)
Radyo vericisi seçiminiz, kullanabileceğiniz alıcı (RX) türünü belirler. Şuanda radyo bağlantısı için en çok tercih edilen ExpressLRS’dir. ExpressLRS uygun fiyatlı, yüksek performanslı ve inanılmaz derecede güvenilirdir.
Birçok üretici ExpressLRS için alıcı ve verici modülleri üretiyor. Bunlardan herhangi birini seçebilirsiniz ve ExpressLRS oldukları sürece birlikte çalışırlar. Bu eğitim için, tamamen yerli olan ORBIT 2.4Ghz Nano RX kullanabilirsiniz. Mükemmel performans sunuyor ve tamamen yerli olduğu için stok erişimi de kolaydır.
B. Diğer Ekipmanlar
Bir quadcopter’ı FPV modunda uçurmak için aşağıdaki aksesuarlara ihtiyacınız olacak.
- Radyo Vericisi (Kumanda): Drone’unuzu kontrol etmek için bir radyo vericisi yani bir kumanda olmazsa olmazdır. Kumanda olarak popüler olarak kullanılan Radiomaster Boxer veya Radiomaster Pocket öneririz. Bu kumandalar ExpressLRS destekelemektedirler.
- FPV Gözlükleri: Şu anda en iyi analog gözlük Skyzone SKY04X olmalı. Daha kısıtlı bir bütçeniz varsa, Skyzone Cobra SD, uygun fiyatlı bir “kutu gözlük” seçeneğini değerlendirebilirsiniz.
- LiPo Piller: Bu sistem için 6S 1000mAh-1300mAh LiPo piller ideal olacaktır. Uygunsuz kullanım tehlikeli olabileceğinden LiPo piller hakkında bilgi edindiğinizden emin olun.
- Pil Şarj Cihazı: Son olarak, bir pil şarj cihazına ihtiyacınız olacak. LiPo pillerde önemli olan hücrelerin dengeli bir şekilde şarj edilmesidir. Bu nedenle mutlaka bir pil şarj cihazına ihtiyacınız olacaktır.
1- Frame Montajı
Karbon fiber parçalardaki, özellikle kolların ve plakaların dış tarafındaki keskin kenarları zımparalayın. Keskin kenarlar, bir kazada kablolarınızı ve batarya kayışınızı kesebilir. Zımparalanmış kenarlar, kazalarda karbon fiber levhanın hasar görme olasılığını düşürmede yardımcı olacaktır.
Kesme, delme ve zımparalama işlemlerinden kalan karbon tozunu temizlemek için tüm karbon fiber parçaları sabunlu suyla yıkayın (karbon fiberin iletken olduğunu unutmayın). Ardından parçaları bir kâğıt havluyla iyice kurulayın.
Çerçeveyi monte etmek için öncelikle kolları ve kol kilidini ön alt plakanın üstüne yerleştirerek başlayın.

Ardından, somunları (push nut) arka alt plakayı kolların üzerine yerleştirin ve alttan vidalarla sabitleyin. Son olarak sekiz alüminyum standoff’u takın, ancak boylarının farklı olduğuna dikkat edin, ön taraftaki dört standoff daha uzundur.


2- Motor Montajı
Şimdi, dört motoru kollara monte etme zamanı. Motor vidalarında sabitleyici sıvı kullanılması önerilir, çünkü motorlardan gelen titreşimler vidaların zamanla gevşemesine neden olabilir. Neyse ki, Xing2 motorlarıyla birlikte gelen vidalarda zaten sabitleyici sıvı uygulanmış olduğundan, ek bir uygulamaya gerek yoktur.
Kollar 6 mm kalınlığında olduğundan, 8 mm’lik vidalar mükemmel uzunluktadır. Rondela kullanmaya gerek yoktur.
Eğer sıradan vidalar kullanıyorsanız, mutlaka vida sabitleyici (Loctite) kullanın. Mavi sıvı tipini tercih edin, çünkü kırmızı sıvı tipi kalıcı kullanım için tasarlanmıştır ve vidaları daha sonra sökmeyi oldukça zorlaştırabilir.
Son olarak, motor vidalarının çok uzun olmadığından ve motor sargısına temas etmediğinden emin olun.
3- Kabloların Bağlantı Şeması
Devam etmeden önce, tüm bileşenlerin nasıl bağlanacağını ana hatlarıyla açıklayan bir kâğıda bir bağlantı şeması çizmek iyi bir fikirdir. Önerdiğim bileşenleri kullanıyorsanız, takip edebileceğiniz bağlantı şemaları şunlardır.
Analog FPV için: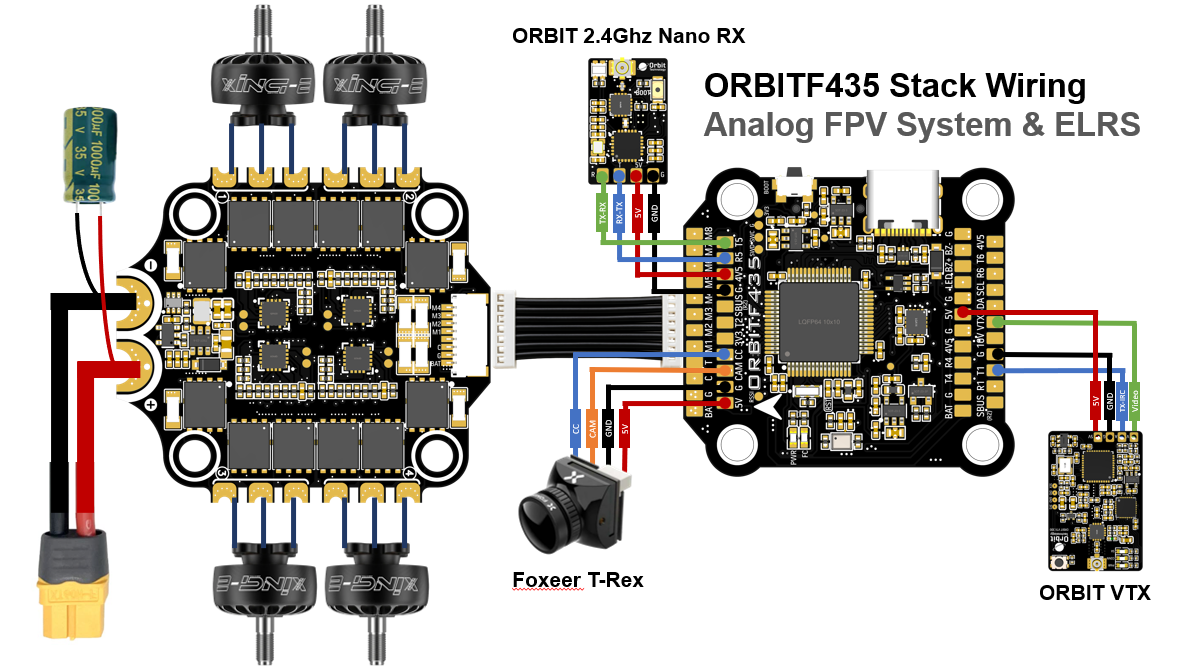
Herhangi bir kabloyu lehimlemeden önce, tüm bileşenleri gövdeye “deneme amaçlı” yerleştirebilirsiniz. Bu işlem, kablo uzunluklarını ölçmenizi, bileşenlerin konumunu belirlemenizi ve olası boşluk/yerleşim sorunlarını fark etmenizi sağlar.
4- ESC Montajı
Öncelikle, gövdedeki dört kısa vidayı ORBITF435 stack ile birlikte gelen uzun M3x25 mm vidalarla değiştirin. FC, ESC ve VTX montajında naylon standoff kullanmaktan kaçının; darbelerde kolayca kırılırlar. Bunun yerine metal vidalar kullanın.
Stack montajında metal vidalar (alt kısımda metal somun ile birlikte) kullanın. Bu, titreşim ve sallantıyı azaltır, dronun daha iyi uçmasını ve daha kolay ayarlanmasını sağlar.
Dört uzun vidaya 4’ü 1 arada ESC ve FC kartlarını yerleştirin. ESC kartının güç pad’lerinin arkaya, motor lehim pad’lerinin ise yukarıya bakmasına dikkat edin. Gövdenin ön tarafı, kamera montaj plakaları için açılmış boşluklardan anlaşılabilir.
ESC’nin alt kısmını kontrol ederek şasiye temas etmediğinden emin olun. Ayrıca, ESC ile FC arasında herhangi bir temas olup olmadığını kontrol edin. (Görsel Lehimlendikten sonra çekilmiştir. Lehim işleminden sonra da bakılması gerekir. Ancak lehimlemeden önce de bakmanız da fayda var.)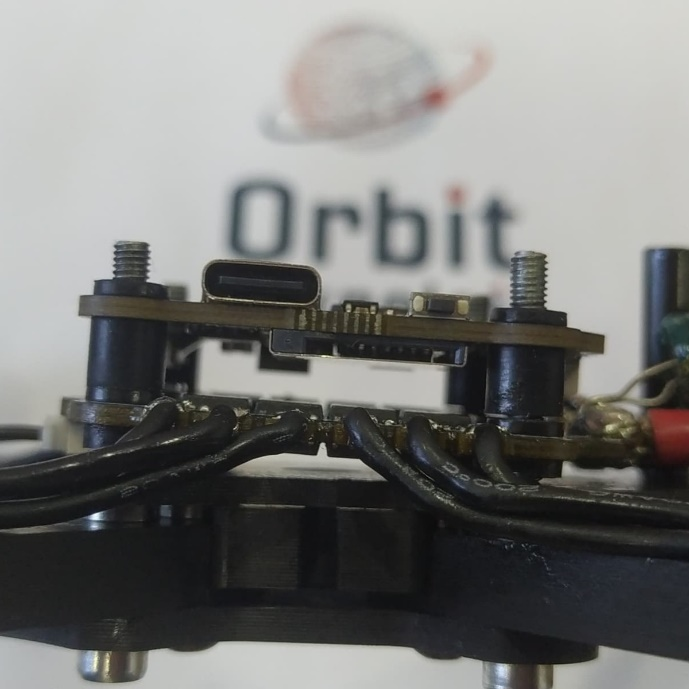
Gerekli motor kablo uzunluklarını belirleyin, biraz boşluk bırakın ve uygun şekilde kesin. Motor kablolarını kollara bez bant veya elektrik bandıyla sabitleyin.

Daha sonra tellerin uç kısımlarını yaklaşık 2mm kadar sıyırıp uçlarını kalaylayın (lehimleyin). 4’ü 1 arada ESC’deki tüm lehim pedlerini kalaylayın. Lehimin yanlışlıkla bileşenlerin üzerine düşüp elektriksel kısa devreye neden olmasını önlemek için, lehimleme yapmadığınız alanları elektrik bandı, kâğıt bant veya maskeleme bandı gibi bantlarla kapatın.
Motor kablolarını ESC’ye lehimleyin. Kabloların sırası veya motor yönü konusunda şimdilik endişelenmeyin; bunu daha sonra yazılım üzerinden değiştirebilirsiniz. Eğer beceriniz varsa, motor kablolarını yan taraftan lehimlemeyi deneyebilirsiniz, böylece drone’u kavramak daha kolay ve düzenli olabilir.
XT60 güç kablosunu, doğru polariteye (artı ve eksi) dikkat ederek ESC üzerindeki güç pad’lerine lehimleyin. Bu adım biraz zorlayıcı olabilir çünkü büyük bakır pad’lerdeki lehimi eritmek için fazla ısı gerekir. Sabırlı olun ve havya sıcaklığını biraz yüksek tutun.
Ardından ORBITF435 Stack ile birlikte gelen 1000uF kondansatörü lehimleyin. Pense yardımıyla bacakları büküp kısaltın, ardından lehimleyin.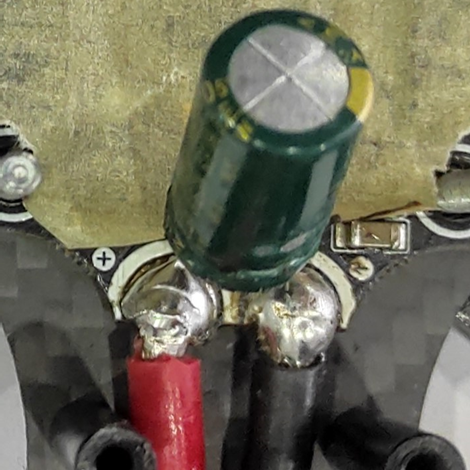
Kondansatörün altına küçük bir parça çift taraflı bant yapıştırın. Kondansatörü, polariteye dikkat ederek (+ ve – uçlarına dikkat ederek), daha önce ESC güç pedlerine bağlı olan kablolara lehimleyin. Sarı işaretli taraf, kondansatörün negatif tarafıdır.
Bir kapasitör, ESC ve motorların ürettiği voltaj dalgalanmalarını ve elektriksel gürültüyü azaltmak için kullanılır. Ayrıca, yamulmuş pervaneler daha fazla gürültü oluşturduğu için bu konuda da fayda sağlar.
Lehimleme İpuçları:
- Büyük pad’lerde bol miktarda lehim ve flux (lehim pastası) kullanın. Lehim bağlantılarının parlak ve dolu olmasına dikkat edin. Tel damarlarını görebiliyorsanız, yeterince lehim uygulamamışsınız demektir.
- Havya ucunu ek yerinden çekerken, lehim, havya ucunuza yapışıyorsa daha fazla flux sürün. Flux aynı zamanda oksitlenmeyi de engeller.
- Büyük pad’lerde yüksek sıcaklık kullanmaktan çekinmeyin, ancak hızlı olun ve pad’i uzun süre ısıtmayın. Motor kabloları ve XT60 için 450°C (840°F), sinyal kabloları için 380°C kullanın.
ESC ve Motorların Kısa Devre Testi;
İlk kez bir LiPo pil bağlamadan önce, elektriksel kısa devre olmadığından emin olun. Multimetreyi kısa devre testi moduna alarak XT60’ın (+) ve (–) uçlarını (ya da doğrudan lehim pad’lerini) test edin. Eğer kısa devre varsa, multimetre sürekli öter. Bu durumda pili bağlamayın, çünkü bileşenlerinize zarar verebilir. Bunun yerine kısa devreye neden olan sorunu bulup düzeltin.
İpucu: Kısa devre testi sırasında, kapasitörlerin şarj olmasından dolayı kısa bir “bip” sesi duyulup ardından sessizlik olması normaldir. Bip sesi bir-iki saniye içinde kesiliyorsa sorun yoktur.
5- FC Montajı
Verilen 8 pinli şerit kabloyu kullanarak FC’yi ESC’ye bağlayın. Uçuş kontrol cihazını 4’ü 1 arada ESC’nin üzerine takarken, FC üzerindeki okun ileriyi gösterdiğinden emin olun. FC üzerinde yer alan pedlerden hangilerini kullanmanız gerekiyorsa onları az bir miktar lehimleyin.
5.1. Motorların BetaFlight ile test edilmesi
Pervaneleri henüz takmayın. Motorları test etmek için bataryayı bağlayın ve USB kablosunu uçuş kontrolörüne takın. Betaflight Configurator içindeki Motors sekmesine girin, motorları tek tek çalıştırın (slider’ı yaklaşık %10’a getirin) ve doğru yönde dönüp dönmediklerini kontrol edin. (Burada ekranın sağ altında, güvenlik için kapalı halde olan seçeneği açmanız gerekmekte)
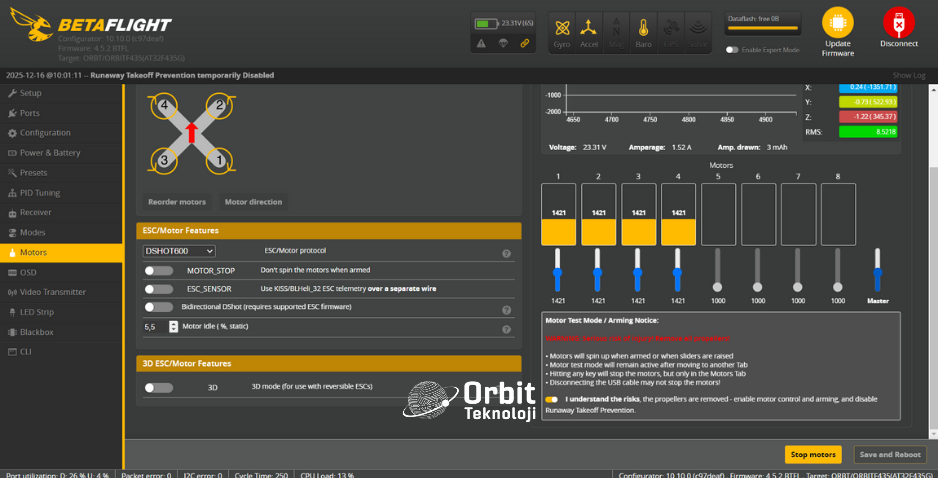
Yanlış yönde dönen bir motoru ters çevirmek için Betaflight Configurator’daki (Motors sekmesi) yönergelerini kullanın. Ayrıca, dönen motor numarasının şemayla eşleştiğinden emin olun; örneğin, motor #1 arka sağ, motor #2 ön sağ vb.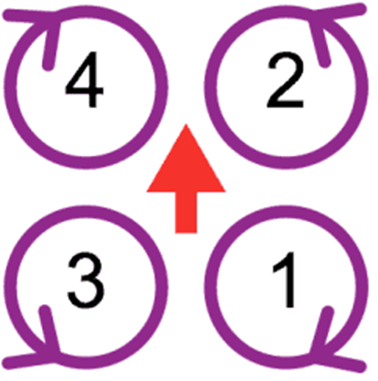
Motor sırası yanlışsa, motorlar sekmesindeki “Motorları Yeniden Sırala” aracını kullanarak ve talimatları izleyerek düzeltmeniz gerekir.
Sorun giderme ipuçları:
– Motorlar dönmüyorsa, pilin bağlı olduğundan emin olun. Pili taktığınız anda ESC bip sesi çıkarmalıdır. ESC’nin FC’ye bağlı olduğundan ve pin bağlantılarının doğru olduğundan emin olun.
– Bir motor hariç tüm motorlar dönüyorsa, o ESC, motor veya FC’den gelen ESC sinyali arızalı olabilir. Sorunu gidermek için çalıştığından emin olduğunuz başka bir motorla değiştirerek sorunun ESC’de mi yoksa motorda mı olduğunu belirleyin
5.2. Motor Yönü Değiştirme
Bir FPV drone’da motor dönüş yönünü değiştirmenin 3 yolu vardır:
– Motor kablolarını değiştirip yeniden lehimleme ile
– BLHeliSuite uygulaması üzerinden veya ESC Configurator ile
– Betaflight Configurator üzerinden değiştirebilirsiniz.
Yöntem 1: Betaflight Configurator ile Motor Yönü Değiştirme
Betaflight 4.3’ten bu yana, Betaflight Configurator’da (motorlar sekmesinde) bir motorun dönüşünü tersine çevirebilirsiniz; bunun için artık BLHeliSuite kullanmanıza gerek yok!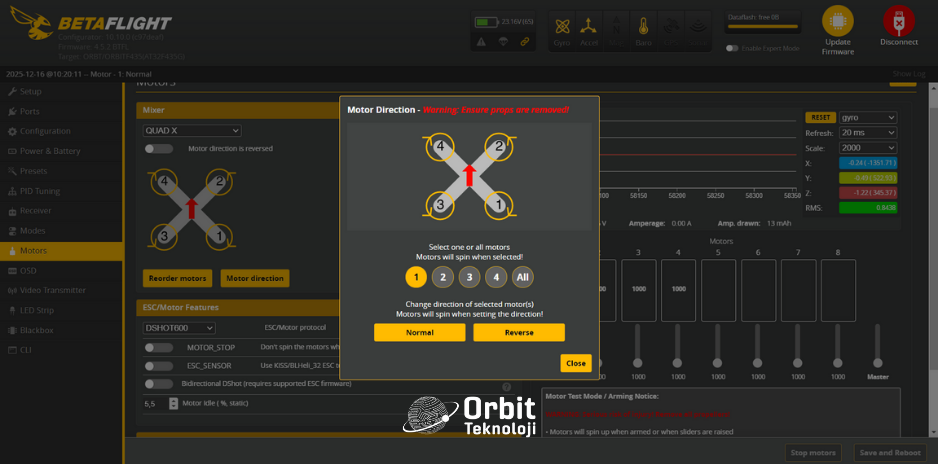
Yöntem 2: Motor Kablolarını Değiştirme
Motor ve ESC arasındaki 3 kablodan herhangi 2’sini değiştirerek motorun dönüş yönünü tersine çevirebilirsiniz. Hangi iki kabloyu kullandığınızın bir önemi yok, sonuç aynı olacaktır.
Yöntem 3: ESC Configurator
Lehim yapmayı sevmiyorsanız, motor yönünü ESC konfigüratörü ile de kolayca değiştirebilirsiniz: BLHeli32 ESC için BLHeliSuite32 veya BLHeli_S ESC için ESC-Configurator. BLHeli_32 ESC kullanıyorsanız programın adı BLHeliSuite_32’dir.
- Konfigüratörü açın ve USB kablosu ile dronunuzu bilgisayara bağlayın.
- Quad’ınızı beslemek için bataryayı takın ve ardından “Connect” düğmesine tıklayın.
- “Read Setup” düğmesine tıklayın – hata alırsanız bu, ESC’nizin BLHeli_32 veya BLHeli_S olmaması anlamına gelebilir; diğer konfigüratörü deneyin.
- Her şey yolundaysa, bulunan ESC’lerin bir özetini göreceksiniz.
- Sağ alt köşeden değiştirmek istediğiniz ESC’yi seçin
- Motor Yönü (Motor Direction) “Normal” ise, “Reverse” olarak değiştirerek motor yönünü ters çevirebilirsiniz. Zaten “Reverse” ise, tekrar “Normal” yapmanız yeterlidir. Ayrıca motoru her iki yönde döndürebilecek “3D”modunu da seçebilirsiniz; bu, 3D acro uçuş için gereklidir. Ancak ne yaptığınızı bilmiyorsanız “3D” modunu kullanmayın.
6- ELRS Montajı
RX antenini en yakın kolun altına kumaş bant ya da plastik kelepçe ile sabitleyin ve anten telinin sıkışmasını önlemek için bantla sarın. Eğer RX üzerinde kablo yoksa RX’i FC’ye lehimlemek için 28AWG veya 30AWG kabloya ihtiyacınız olacaktır. RX’i, çift taraflı köpük bant veya plastik kelepçe kullanarak FC’nin önüne monte edin. Çerçevede yeterli alan olan herhangi bir yere monte edebilirsiniz. Biz makarona sarıp gövdenin alt kısmına bağlamayı tercih ettik.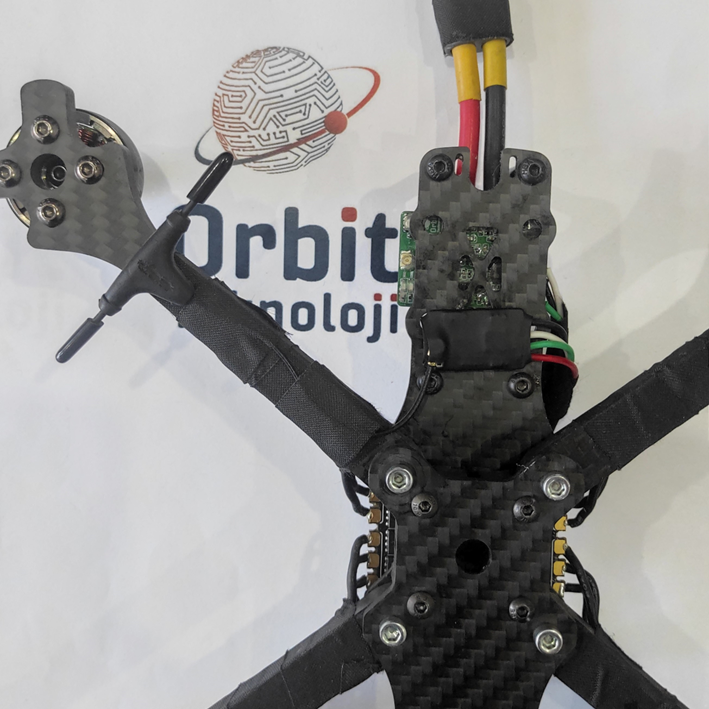
FC’nin üst kısmında herhangi bir kablo olmaması en iyisidir, jiroskopun üstünden veya yanından kablo geçirmekten kaçının, bu uçuş sırasında titreşime neden olabilir.
Alıcıyı (receiver) radyoya (TX modülü) ExpressLRS kurulum rehberine göre bağlayın (bind edin). Betaflight Configurator’da şu ayarları yapın:
– Ports sekmesine gidin ve alıcıya bağlı UART için “Serial RX” seçeneğini etkinleştirin (ORBITF435 için UART5).
– Receiver sekmesinde, Receiver Mode olarak “Serial (via UART)” seçin ve Serial Receiver Provider kısmında “CRSF”’yi seçin.
– Bu işlemin ardından, alıcının düzgün çalıştığını Receiver sekmesinde kontrol edin. Çubuklar (kanallar), radyodaki stick’leri hareket ettirdiğinizde hareket etmelidir. Yanlış kanallar tepki veriyorsa, Channel Map’i “default (AETR)” veya “TAER” gibi farklı bir seçenekle değiştirin.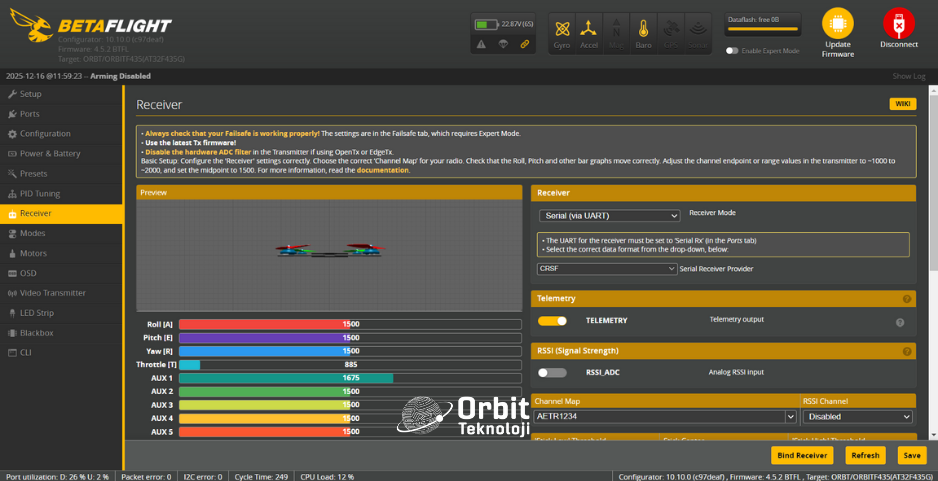
Radyoda en az iki anahtar (switch) ayarlayın: biri arm – disarm için (motorları başlatma ve durdurma), diğeri beeper (buzzer) için. İsterseniz üçüncü bir anahtar da uçuş modu için ayarlayabilirsiniz (ör. angle modu).
Bu anahtarların çalıştığını Receiver sekmesinde kontrol edin; AUX1 ve AUX2, anahtarları çevirdiğinizde tepki vermelidir.
7- FPV (VTX) Montajı
VTX’i monte ederken, standoff kullanmak yerine çift taraflı bant ve zip tie (kablo bağı) kullanmayı düşünebilirsiniz. Görünümünü önemsemiyorsanız, bu yöntem hem kolay, güvenli hem de ağırlık açısından avantajlıdır.
VTX’in altına çift taraflı sünger bant uygulayın; bant, monte edildiğinde çerçeve ile temas etmeyi önlemek için bakır alanları kaplamalıdır. Kullandığımız VTX modelinde ekstra soğutma paneli de kullandık. Soğutma kısmında herhangi bir komponent olmaması ve sadece pinlerin olmasından ötürü o kısmı makaronla kapatmaya gerek duymadık. Sizin kullandığınız VTX modeline göre, teması engellemek için, makaron veya kılıf kullanabilirsiniz.
Çerçevenin alt kısmından bakıldığında ise bu şekilde görünüyor.
– VTX kablosunu FC’ye lehimleyin ve sallanmadığından emin olun.
– VTX antenini ara parçaya bağlayın.
– Betaflight’ta VTX’i kurmak için Portlar sekmesine gidin ve IRC pad’inizi bağladığınız UART için Peripherals altında IRC Tramp’ı seçin.
– Aşağıdaki VTX Tablosu kod parçasını ORBIT VTX300’ün CLI’sine kopyalayın. Bu, OSD menüsünde VTX ayarlarını değiştirmenizi sağlayacaktır.
# vtxtable
vtxtable bands 6
vtxtable channels 8
vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 0 5885 5905 0 0
vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable band 6 LOWRACE L FACTORY 5333 5373 5413 5453 5493 5533 5573 5613
vtxtable powerlevels 5
vtxtable powervalues 1 2 14 20 26
vtxtable powerlabels 0 RCE 25 100 400
save
8- Kamera Montajı
Kamerayı çerçevenin içine yerleştirin ve kamera kablolarını istediğiniz uzunlukta kesin. Kabloları bükerek sıkı tutun.
Kamera kablolarını FC’ye lehimleyin: Kırmızı 5V’a, siyah GND’ye ve sarı CAM’e gider. Her ihtimale karşı kullandığınız modelin Datasheetine bakmanız iyi olur. V değerleri farklı olabilir. (örn; 10V)
9- Son Kontroller
FC’yi naylon somunlarla (fotoğrafta beyaz olanlarla) sabitleyin; fazla sıkmamak için elle vidalayın. Somunlar yalnızca kauçuk conta ile temas etmelidir. Sıkıştırılmış contalar titreşim sönümlemeyi azaltır ve yumuşak montajın amacını bozar.
Üst plakayı takın ve batarya kayışını içinden geçirin. Source One V5, iyi bir kauçuk batarya pedi ile birlikte gelir. Ped yetersiz gelirse veya daha iyisi ile değiştirebilirsiniz.
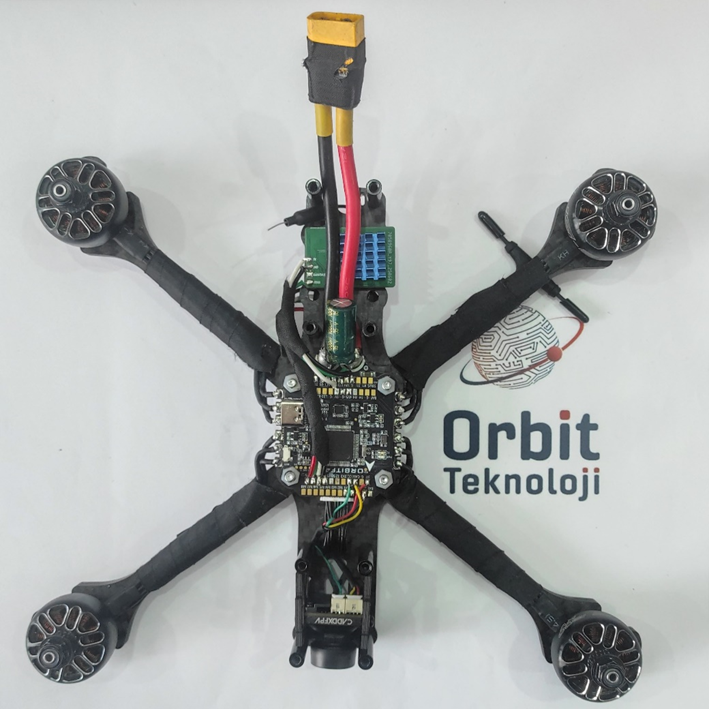
10- Dronun Son Hali
Tamamlanmış dronun ağırlıkları şu şekildedir:
– Dron: 357 g
– Dron + 6S 1100 mAh LiPo: 632 g
Bu, 5 inç bir drone için oldukça hafif bir ağırlık olup mükemmel uçuş performansı sağlar. Genel bir kural olarak, pil ve frame dahil toplam ağırlığın 750 g’ı geçmemesine dikkat edin; aksi takdirde drone tank gibi uçar ve freestyle uçuş için hoş bir his vermez.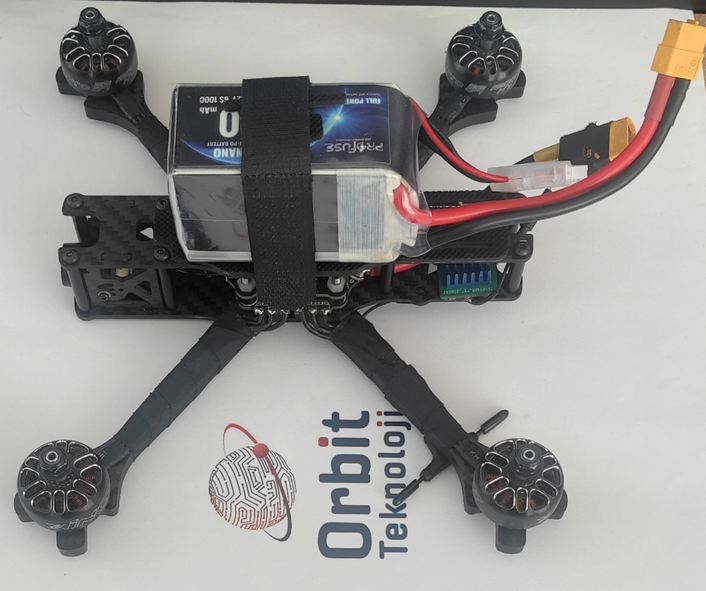
Pervaneleri takarken, farklı dönüş yönlerine dikkat edin: CW (saat yönünde) ve CCW (saat yönünün tersinde). Pervanelerin doğru motorlara takıldığından emin olun; aksi takdirde dronunuz kalkmayabilir veya kalkmaya çalışırken devrilebilir.
Pervaneleri motor üzerinde güvenli şekilde tutmak için M5 fiber somunlar kullanın. Başta sıkmak zor olabilir, ancak zamanla kolaylaşacaktır. Pervane göbeğinin çatlamasını önlemek için fazla sıkmayın. Sadece, motor belini tutarken pervaneyi elinizle çevirmeye çalıştığınızda hareket etmeyecek kadar sıkın.
Pili (ve GoPro’yu) monte ederken, ağırlık merkezinin drone’un merkezine mümkün olduğunca yakın olduğundan emin olun. Pilin doğru yerleştirilip yerleştirilmediğini kontrol etmek için, üst plakanın ortasını iki parmağınızla kavrayın ve drone’un düz durup durmadığına bakın. Ağırlık merkezini dört motorun ortasında tutmak çok önemlidir. Quad ön tarafta daha ağırsa, ön motorlar düz pozisyonunu korumak için ön motorları daha fazla çalıştıracak ve bu da uçuş performansını olumsuz etkileyecektir.
Ve test uçuşuna hazırız!
11- 3D Parçalar
Daha temiz, daha şık ve daha dayanıklı bir yapı için 3D yazıcıyla üretilmiş parçaları kullanmayı düşünün. Thingiverse.com’da “Source One V5” araması yaparak çeşitli tasarımlar bulabilirsiniz. Diğer çerçevelerin parçaları da Source One’da işe yarayabilir.
Tavsiye edebileceğimiz 3D tasarımlarından birkaçı:
- V4 için tasarlanmış, ancak bazı parçalar V5’e uyumludur: https://www.thingiverse.com/thing:4844808
- Kol koruyucusu ve tampon: https://www.thingiverse.com/thing:4706164
GoPro 5-7 Montajı: https://www.thingiverse.com/thing:5416938
Önerdiğim en hızlı ve görsel olarak hemen fark edilen modifikasyonlardan biri, 3D baskı kol koruyucularının eklenmesidir. Bu koruyucular sadece dekoratif değil; karbon fiber kolların bütünlüğünü korumada kritik bir rol oynar. Onlar olmadan, kollar çarpma anında uçlarından kolayca çatlayabilir. 3D baskı kol koruyucularının güzelliği, darbeleri emip dağıtarak hasar riskini önemli ölçüde azaltabilmeleridir.
Ayrıca motorları da çarpmalar sırasında korurlar. Bu koruyucular, motor milinin bükülmesini önleyebilir ve motor bellerini çizilmelere ve ezilmelere karşı koruyarak performansın korur.
Kol koruyucuları kullanmak için daha uzun motor vidalarına ihtiyacınız olabilir, örneğin M3x10 mm.
Analog kurulumda, 3D baskı anten montajı kullanmak, harici MMCX–SMA uzatma kablosunu kullanmanıza ve VTX antenini daha iyi sinyal kalitesi için dairesel polarize bir antenle değiştirmenize olanak tanır.
3D yazdırılmış parçalar aynı zamanda kamera ve kondansatörün montajında da kullanılabilir.
Alternatif kaynak: https://oscarliang.com/how-to-build-fpv-drone-analog/